Topics for bachelor theses
In principle, all topics are also possible as bachelor's theses. Please contact the supervisor of the thesis to get more information. A similar topic to an already assigned thesis can be requested from the supervisor at any time.
Grundsätzlich sind alle Themen auch als Bachelorarbeiten möglich. Bitte wenden Sie sich an den Betreuer/die Betreuerin der Arbeit, um weitere Informationen zu erhalten. Ein ähnliches Thema zu einer bereits vergebenen Arbeit kann jederzeit bei der Betreuerin/dem Betreuer angefragt werden.
Study direction
GNSS/Satellite Geodesy
Chair
Prof. Dr. Markus Rothacher ()
Primary supervisors
Dr. Gregor Moeller ()
Title
A radio occultation experiment with commercial off-the-shelf GNSS receivers
Abstract
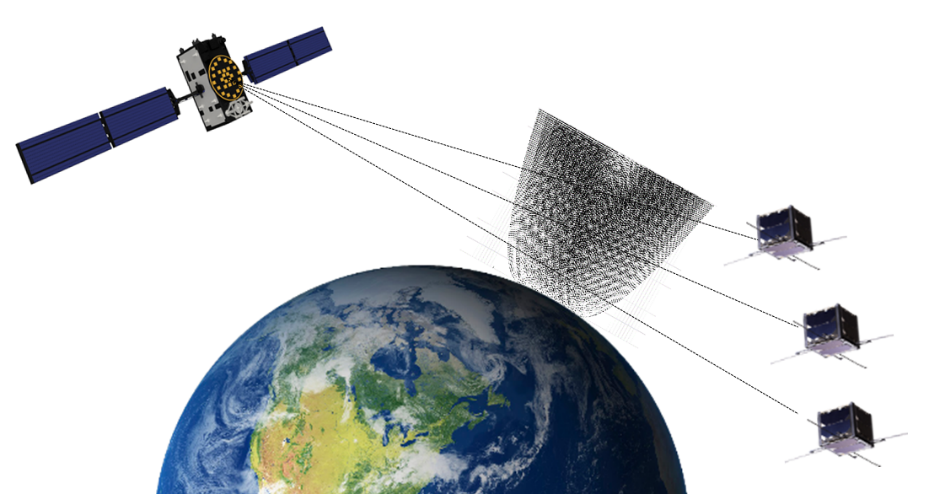
Radio occultation is a powerful technique for monitoring of the atmospheric static using signals of the Global Navigation Satellite Systems (GNSS). It is based on the principle of atmospheric refraction leading to a bending of the GNSS signal paths in the atmosphere. Careful analysis of the GNSS carrier phase measurements allows for the reconstruction of the bending angles and therefore, derives valuable information about the total electron content in the ionosphere and/or pressure, temperature and water vapor in the lower atmosphere.
As of today, radio occultation experiments are based on specifically designed GNSS receivers. For small satellite missions these receivers are not very suitable due to their high power consumption and development costs. Thus, together with the Swiss company u-blox MPG has started an initiative to qualify commercial off-the-shelf (COTS) GNSS components for the operation in space.
In this thesis, you are going to contribute to the development of the next generation of GNSS payload by qualifying commercial off-the-shelf GNSS receivers, such as the ZED-F9P from u-blox, for monitoring of the atmospheric state onboard small satellites. In an initial study, the high-rate performance of the low-cost u-blox ZED-F9P receiver has to be analyzed in combination with selected GNSS antennas to find a good setting for the intended radio occultation experiment. In a second step, the GNSS system is installed on a meteodrone and launched into an altitude of 2-3 km above surface to record GNSS measurements at negative elevation angles. In post-processing, the data has to be carefully analyzed using the Radio Occultation Processing Package (ROPP). Based on the results of this thesis, a recommendation shall be given about the qualification of the selected GNSS components for radio occultation experiments on small satellites missions and therefore, provide new opportunities for Earth observation.
Particularities:
Group work possible, 1-2 group members
Study direction
GNSS/Space Geodesy
Chair
Prof. Dr. Markus Rothacher ()
Primary supervisors
Yara Rossi ()
Title
Kalibration der GNSS-Antennen auf den Astrocast Nanosatelliten mit einem Industrie-Roboter
Motivation
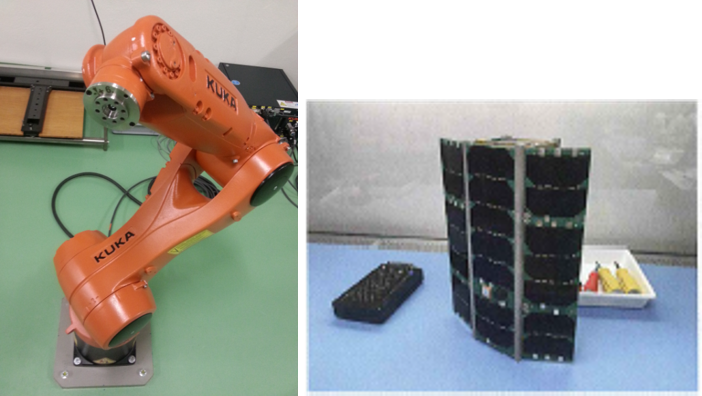
Das MPG verfügt über einen Industrie-Roboter der Firma Kuka (6 Achsen, 90cm Reichweite, 5kg Last, max. Geschwindigkeit 8.9 m/s, max. Beschleunigung 36 m/s2). Dieser Roboter wurde sorgfältig mit terrestrischen Methoden kalibriert und kann nun für die Kalibrierung von GNSS-Antennen verwendet werden. Dabei sind für uns die zwei Antennen, die zusammen mit vier u-blox multi-GNSS-Empfängern auf den Astrocast-Satelliten montiert sind, von grösster Bedeutung. Zwölf Satelliten wurden bisher in den Weltraum katapultiert. Wir haben aber noch ein sogenanntes "Qualification Model" (QM) des Satelliten verfügbar, das auf den Roboter montiert werden kann. Durch das Rotieren und Neigen des Satellitenmodells ist es möglich, die Phasenzentrumsänderungen der zwei Antennen zu erfassen und zu kalibrieren. Die Antennenphasenzentrums-variationen, die so bestimmt werden können, sind äusserst wichtig für die Analyse der kurzen Basislinie zwischen den zwei Antennen und für die Bestimmung der Orientierung des Satelliten.
Tasks:
1) Sich mit dem Roboter und seiner Bedienung vertraut machen.
2) GNSS-Messungen mit dem auf dem Roboter montierten Satellitenmodell auf dem Dach des HPV-Gebäudes durchführen.
3) Analyse der GNSS-Daten der Experimente mit einem vorhandenen Software-Paket.
Particularities:
Group work possible, 1-2 students per group, total number of students per theme: 3
Fachbereich
GNSS / Satellitengeodäsie
Leiter
Prof. Dr. M. Rothacher ()
Betreuer
Lukas Müller ()
Titel
Formation eines GNSS-Netzes von tieffliegenden Satelliten im Weltraum
Motivation
Immer mehr Satelliten in tieffliegenden Umlaufbahnen haben einen genauen GPS-Empfänger an Bord. Heute sind es insbesondere die Missionen GRACE-A und -B, TerraSAR_X, TanDEM-X, COSMIC (6 Satelliten), Jason-2, Jason-3, CryoSat-2, Sentinel 1-3, SWARM 1-3, Haiyang 2A und andere mehr. Zudem werden wir zusammen mit der Firma Astrocast am 28. Dezember 2020 die ersten fünf Satelliten einer Konstellation von insgesamt 80 Satelliten, die mit multi-GNSS-Empfängern bestückt sind, in den Weltraum schiessen. Es stellt sich nun die Frage, ob mit diesen Satelliten ein Netz von GPS-Basislinien zwischen den Satelliten im Weltraum realisiert werden kann und viele Beobachtungen ein solches Netz liefern würde. Ein solches Netz von Basislinien könnte dann ohne Stationen am Boden mit Doppeldifferenzen (mit Mehrdeutigkeitslösung) ausgewertet werden, was eine wesentlich höhere Genauigkeit verspricht, da insbesondere keine troposphärischen Verzögerungen bestimmt werden müssen und durch die Doppeldifferenzbildung Fehlerquellen eliminiert werden können.
Aufgaben
Berechnungen mit echten und simulierten Bahnen, wie ein solches Netz im Weltraum aussehen würde. Bestimmen der Anzahl Doppeldifferenz-Beobachtungen, die in einem solchen Netz (echt und simuliert) gebildet werden können. Simulation von GPS-Daten zur Bestimmung der Genauigkeit, die ein solches Satelliten-Netz erreichen würde und welche interessanten Parameter damit bestimmt werden könnten (z.B. das Gravitationsfeld oder die Ionosphäre) und wie genau. Was wäre eine sinnvolle zukünftige Konstellation von Satelliten? Wie sieht es bei der Astrocast-Konstellation aus?
Besonderes
Gruppenarbeit möglich
Fachbereich
GNSS / Satelitengeodäsie
Leiter
Prof. Dr. M. Rothacher ()
Betreuer
Iván Herrera Pinzón ()
Titel
Können mit SLR-Beobachtungen für längere Basislinien Einfach- und Doppeldifferenzen gebildet werden und welche Vor- und Nachteile sind damit verbunden?
Beschrieb
Bei GNSS werden viele Fehlerquellen durch die Bildung von Doppeldiffe-renzen eliminiert oder stark reduziert. Daher verwenden alle GNSS-Algorithmen mit relativer Positionierung (Basislinien) Doppeldifferenzen.
Erste Versuche zeigen, dass bei kurzen Basislinien auch mit SLR-Beobacht-ungen Einfach- und Doppeldifferenzen gebildet werden können und dass dabei Fehler (z.B. Zeitfehler (time biases) oder Distanzfehler (range biases)) eliminiert oder stark reduziert werden können.
In dieser Arbeit soll untersucht werden, ob solche SLR-Doppeldifferenzen auch für längere Basislinien gebildet werden können und wie viele Doppeldifferenzen aus den bestehenden SLR-Beobachtungen resultieren. Danach sollen die Residuen der Doppeldifferenz-Beobachtungen (berechnet mit den besten Stationskoordinaten und Bahnen) analysiert werden, um festzustellen, welche Fehlerreduktion durch die Bildung von Doppeldifferen-zen möglich ist. Als letzten sollen mit den Beobachtungen die relativen Stationskoordinaten zwischen den beiden Stationen der Basislinien geschätzt werden (existierendes Matlab-Programm) und mit den ITRF-Werten verglichen werden.
Besonderes
Gruppenarbeit möglich

Fachbereich
GNSS/Satellite Geodesy
Leiter
Prof. Dr. M. Rothacher ()
Betreuer
Dr. Kangkang Chen () and Dr. Gregor Moeller ()
Titel
Basislinie zwischen zwei Satelliten im Weltraum
Motivation
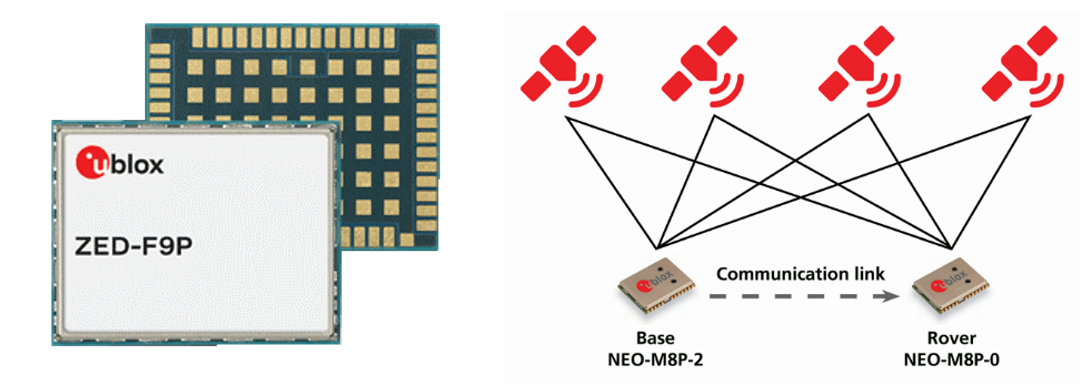
Das Ziel dieses Projekts ist es zu verifizieren, ob die neuen kostengünstigen ZED-F9P 2-Frequenz-GNSS-Empfänger der Firma u-blox in Thalwil verwendet werden können, um im Weltraum eine Basislinie zwischen zwei Satelliten mit Real-time Kinematic (RTK), d.h. mit relativer Positionierung zu bestimmen. Dies wäre innovativ und äusserst nützlich für Formationsflüge von Satelliten und für Manöver im Weltraum. Alle wichtigen Aspekte dieses Themas sollten dabei betrachtet werden, insbesondere: (1) Können die u-blox Empfänger im Weltraum relative Positionen zu berechnen, nachdem die Höhen- und Geschwindigkeitslimiten entfernt wurden? (2) Was ist die Genauigkeit dieser relativen Positionierung zwischen Satelliten? (4) Was für eine Kommunikationsmethoden könnte zwischen den Satelliten verwendet werden?
Ein GNSS-Signalgenerator wird zur Verfügung stehen, mit dem GNSS-Signale so generiert werden können, wie sie im Weltraum von einem Empfänger auf einem Satelliten empfangen werden. Dies wird es ermöglichen, die Funktionsfähigkeit der GNSS-Empfänger zu testen und zu validieren. Im Rahmen dieses Projekts sollen mit dem Signalgenerator Basislinien unterschiedlicher Länge generiert und ausgewertet werden. Die Resultate können dann mit denen von teuren geodätischen GNSS-Empfängern verglichen werden.
Besonderes
Gruppenarbeit möglich
Fachbereich
Satellitengeodäsie / Navigation
Leiter
Prof. Dr. M. Rothacher ()
Co-Leiter/Betreuer
Daniel Willi ()
Roland Hohensinn ()
Titel
Vergleich der Ausgleichungsprogramme LTOP und SALSA für geodätische Netze
Beschrieb
Netzausgleichungsprogrammen kommen in der Praxis eine grosse Bedeutung zu. Je nach verwendetem Produkt, bedeutet dies für ein Unternehmen einen erheblichen Kostenpunkt. Zudem werden die verwendeten Algorithmen oft nicht offengelegt. Mangels Zugang zum Quell-Code sind eigene Erweiterungen meistens nicht oder nur sehr umständlich möglich. Eine sehr spannende Alternative bieten Open-Source Ausgleichungsprogramme. Ein solches Programm ist SALSA: “An Open Source Geodetic Least Squares Adjustment Software Suite” (https://www.arlut.utexas.edu/salsa/). Das Programm wurde von Beginn an Open-Source entwickelt und ist entsprechend gut dokumentiert.
In der Projektarbeit soll SALSA mit dem etablierten Ausgleichungsprogramm LTOP von swisstopo verglichen werden. Zum einen soll der Funktionsumfang der beiden Programme verglichen werden. Zentraler Teil der Arbeit ist aber der Vergleich verschiedener Netze und Berechnungen. Allfällige Differenzen sollen analysiert und beurteilt werden. Je nach Umfang der Arbeit ist auch denkbar, dass eigene Module in die Software implementiert werden (z. B. Berechnung der Zuverlässigkeit).
Möglicher Ablauf der Arbeit
- Vertraut machen mit dem Programm SALSA
- Vergleich des Funktiosumfangs von SALSA und LTOP
- Berechnung verschiedener Netze in SALSA und LTOP und Vergleich der Resultate
- Analyse allfälliger Differenzen
- evtl. Implementierung eigener Module
- Verfassen eines Schlussberichts mit Empfehlungen
Besonderes
Gruppenarbeit möglich, max. 2 Personen