Topics for master theses
In principle, all topics are also possible as bachelor's theses. Please contact the supervisor of the thesis to get more information. A similar topic to an already assigned thesis can be requested from the supervisor at any time.
Grundsätzlich sind alle Themen auch als Bachelorarbeiten möglich. Bitte wenden Sie sich an den Betreuer/die Betreuerin der Arbeit, um weitere Informationen zu erhalten. Ein ähnliches Thema zu einer bereits vergebenen Arbeit kann jederzeit bei der Betreuerin/dem Betreuer angefragt werden.
Study direction: GNSS / Satellite Geodesy
Supervisor: Prof. Dr. Markus Rothacher ()
Advisor/further supervisor: Dr. Gregor Moeller () and Yara Rossi ()
Title: Calibration of the GNSS antennas mounted on an Astrocast nano-satellite using an industry robot
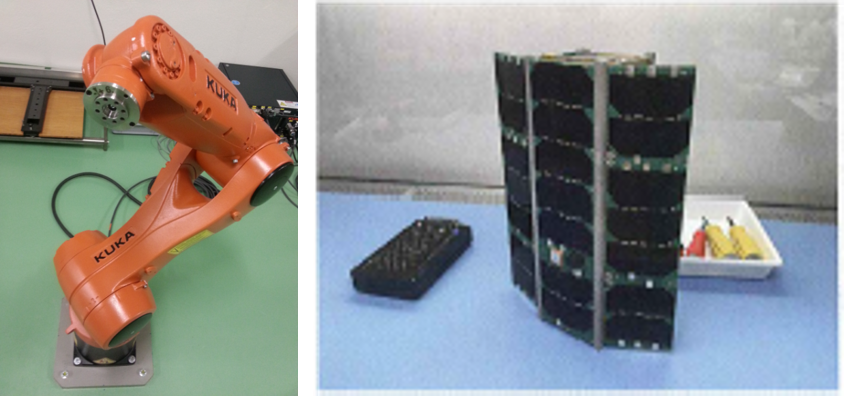
Abstract: Motivation: The MPG disposes of an industry robot of the company Kuka (6 axes, 90cm range, 5kg payload, max. velocity 8.9 m/s, max. acceleration 36 m/s2). The robot has been carefully calibrated with terrestrial measurement techniques and can be used for the calibration of GNSS antennas. Of highest importance are the phase center offsets and variations of the two GNSS antennas located on the Astrocast nano-satellites 12 of these satellites have already been launched into orbit. A qualification model (QM) of such a 3-unit cube satellite is available and can be mounted on the robot. By rotating and tilting the satellite model with the robot, it will be possible to derive the antenna phase center variations of the two antennas mounted on the satellite. The derived antenna patterns will be crucial to analyze the raw GNSS data collected on the short baseline between the two antennas.
Tasks:
1) Get familiar with the robot operations
2) Performing GNSS measurements on the roof of the HPV building with the satellite mounted on the robot.
3) Analysis of the GNSS phase data from the performed experiments with an existing software
Particularities: -
This work can be carried out by a group. Max. number of students: 2
Study direction: GNSS / Satellite Geodesy
Supervisor: Prof. Dr. Markus Rothacher ()
Advisor/further supervisor: Dr. Gregor Moeller () and Kangkang Chen ()
Title: Orbit determination tests for the future GNSS satellite payload using a GNSS signal generator
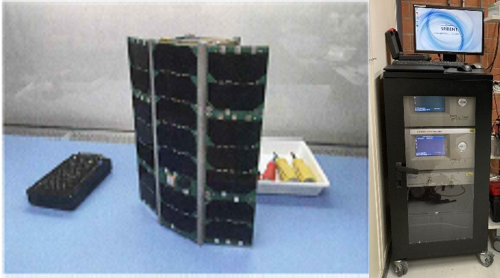
Abstract: In the last two years, a total of 12 nano-satellites of the Swiss company Astrocast were launched into space. The GNSS payload onboard these 3-unit cube satellites (10cm x 10 cm x 30 cm) consists of four multi-GNSS u-blox receivers and two antennas and has been developed by MPG group together with the University of Applied Sciences in Lucerne (HSLU). The GNSS payload is capable of determining the precise position and velocity of the satellites in real-time. Now a new GNSS payload is planned using the new u-blox dual-frequency multi-GNSS receiver ZED-F98P. Therefore, this receiver has first to be tested for its use in space.
The goal of this thesis is to assess the performance of the new u-blox receiver (positions and velocities) in orbit by using a GNSS signal generator that can simulate the signals of the GNSS satellites exactly as they are received by a GNSS receiver onboard a satellite in orbit. By connecting the GNSS signal generator to the new u-blox receiver, positions and velocities can be obtained that can be compared with the ground truth orbit that has been fed into the signal generator. A GNSS signal generator is available at EPFL in Lausanne and can be used for this thesis. In addition, some datasets from initial tests are already available that can also be analyzed. We expect that there are some systematic effects in the results that are not yet fully understood.
Tasks:
• Simulate the orbits of the real satellites in the signal generator and connect it to the u-blox receiver
• Compare the positions and velocities estimated by the receiver with the orbit that was input into the signal generator.
• Compare the results with the results obtained from the receivers onboard the Astrocast satellites in orbit around the Earth.
• Interpretation of the effects visible in the comparisons
Particularities: -
This work can be carried out by a group. Max. number of students: 2
Study direction: GNSS
Supervisor: Prof. Dr. Markus Rothacher ()
Advisor/further supervisor: Iván Herrera Pinzón ()
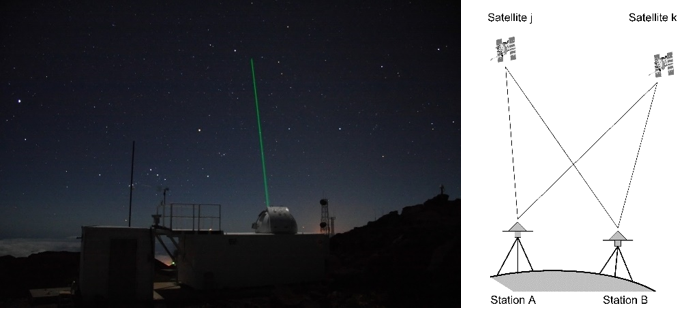
Title: Analysis of SLR observations from long baselines with a new, differential strategy using single- or double-differences
Abstract: In GNSS, many error sources can be eliminated or strongly reduced by forming single- and double-differences. Therefore, all GNSS algorithms with relative positioning (baselines) use double-differences and make use of the advantages thereof.
First studies with very short baselines show, that it is possible to form single- and double-differences also for SLR observations and that, indeed, major error sources (range biases, time biases, orbit errors) can be eliminated or reduced.
In this thesis we want to analyze whether such SLR single- and double-differences can also be used for longer baselines, how many double-difference observations will result and how good the station coordinates and other parameter types may be estimated. This is an approach that has never been used yet in the space geodesy community. The relative station coordinates determined can also be compared with the ITRF coordinates for the stations to assess the quality of the solution.
It is also planned to do a special measurement campaign with the nearby SLR stations Zimmerwald, Graz and Wettzell, where the same tracking scenario will be used at these three sites to allow for the forming of a lot of single-differences.
Particularities: -
This work can be carried out by a group. Max. number of students: 2
Study direction: GNSS
Supervisor: Endrit Shehaj ()
Advisor/further supervisor: Benedikt Soja ()
Title: ML approach for future atmospheric refraction modelling
Abstract: GNSS signals travelling through the atmosphere sense the atmospheric gases along their path; especially high spatio-temporal variations of water vapor cause delays/distortions that are difficult to model and correct. This directly affects the output of the technique, for instance in sensing and navigation applications. Empirical models based on ground meteorological parameters are commonly used to model the tropospheric effects. However, their accuracy is not enough for high-precision applications, where in consequence the so-called zenith total delay (ZTD) has to be estimated together with other unknown parameters (coordinates etc.).
For decades, the Institute of Geodesy and Photogrammetry at ETH Zurich has been studying collocation methods for the modeling of tropospheric delays using meteorological parameters, successfully interpolating pointwise or integral atmospheric observations. Meanwhile, machine learning has become a widely used and valuable alternative, when big datasets are available for the training process. Indeed, we have already successfully predicted ZTDs based on meteorological parameters with an accuracy of 1-2 cm for locations (GNSS stations) already used in the training phase. However, predicting delays at new locations with machine learning algorithms with a good accuracy resulted very difficult. Therefore, we developed a framework, where we combine ML and collocation in order to predict (relatively) accurately tropospheric delays at any point in the area of investigation. We benefit from the synergic abilities of ML and collocation to predict accurately zenith delays in time and space, respectively.
Furthermore, (Kitpracha et al. 2019) uses a Long Short Term Memory (LSTM) neural network approach in combination with the SSA+Copula method to predict the future zenith wet delay based on past time series of temperature, water vapour pressure as well the wet delay itself.
A framework to predict future zenith delays for the entire area of investigation, would benefit any GNSS receiver (having a-priori tropospheric corrections), as well for PP solutions.
The availability of meteorological data from multiple online sources is an advantage, in order to train the neural networks, to produce delays that affect the radiowave signals due to the atmospheres refractivity. GNSS measurements (such as zenith pathdelays) from the swisstopo network over Switzerland can be used as outputs for the training period.
Objective
In this project, the main goal is to investigate/estimate the potential of our combined machine learning and collocation approach for prediction of future delays caused by the atmosphere into different space geodetic techniques.
Possible tasks to be performed:
1. Review of the state of the art
a. Review of the state of the art for machine learning techniques and algorithms.
b. Review state of the art of machine learning technique for meteorological/atmospheric parameters and phenomena.
c. Review state of the art of collocation for ZTD spatial interpolation.
2. Machine learning approach for prediction of future atmospheric path delays. Three algorithms to be investigated: RF, NN and LSTM.
3. Combination of ML and collocation: future atmospheric pathdelays to be processed with the collocation software to produce fields of tropospheric parameters. (Help from the supervisor for this task)
Particularities: -
This work can be carried out by a group. Max. number of students: 2
Study direction: GNSS / Satellite Geodesy
Supervisor: Prof. Dr. Markus Rothacher ()
Advisor/further supervisor: Endrit Shehaj ()
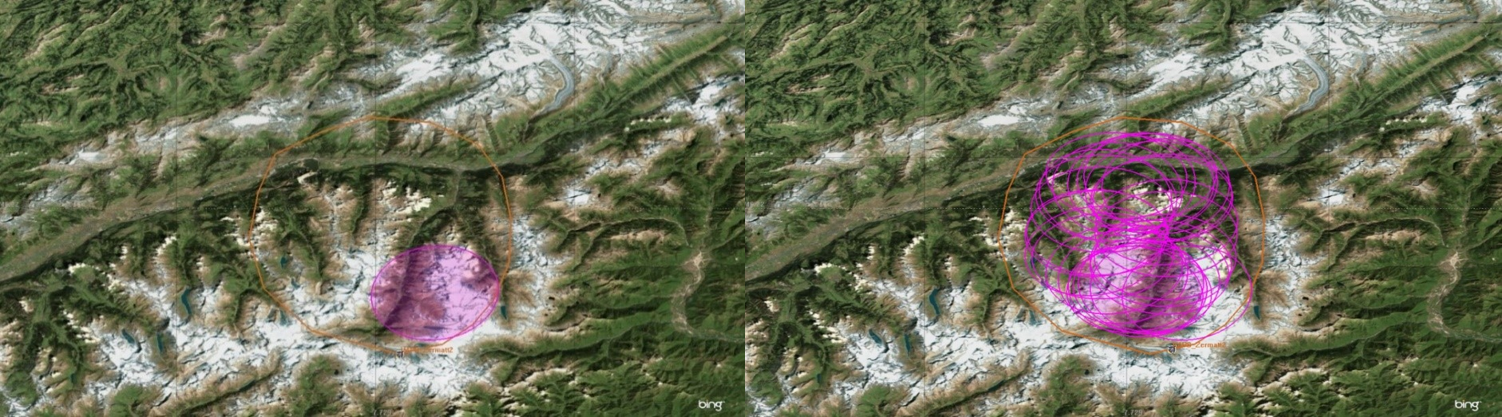
Title: HAPS: High Altitude Pseudo-Satellites for Water Vapor Determination
Abstract: High Altitude Pseudo Satellites (HAPS) are stratospheric platforms that stay over a fixed point on Earth from weeks to months. Compared to ground-based systems, towers or aircraft, HAPS operate quasi-stationarily at an altitude of approximately 20 km. This allows them to complement or extend the capabilities of satellites in the domains of Earth Observation, Telecommunication and Navigation with the potential to further integrate with ground-based infrastructure. The European industry and research community is committed to develop HAPS systems while the advancing miniaturisation of sensor and communication technologies provides compact payloads compatible with the weight and power limitations of these platforms. Integrating HAPS into satellites systems offers new opportunities to provide improved products and services.(from ESA)
In this project, the goal is to estimate the water vapor in the atmosphere using the HAPS platform. Having a high time and spatial resolution, HAPS would be a valuable source to reproduce accurate water vapor profiles.
The tasks that the student should follow for this project are:
- Review of the state of art for HAPS platforms
- Simulation of synthetic meteorological measurements (pathdelays) from HAPS platforms for different scenarios (simulated using System Tool Kit) in Switzerland (for instance in Valais). Different elements such as radar angle, geographical location, time resolution should be considered/simulated
- analysis of the resulting water vapor profiles, for different scenarios selected
- comparison of the HAPS water vapor profiles with profiles obtained by synthetic GNSS data. The GNSS data outputs can be provided by the supervisor
- investigation of possible combination of GNSS and HAPS measurements (optional)
Particularities: -
This work can be carried out by a group. Max. number of students: 2
Study direction: GNSS / Meteo
Supervisor: Dr. Roland Hohensinn () and Dr. Matthias Aichinger-Rosenberger ()
Advisor/further supervisor: Prof. Dr. Alain Geiger ()
Title: Multi-purpose GNSS-Meteo collocation station: soil moisture monitoring
Abstract: The group of Mathematical and Physical Geodesy at ETH Zürich is currently in the process of designing a prototype GNSS payload to be mounted at SwissMetNet station Zürich-Affoltern, operated by MeteoSwiss. The idea behind this approach is the built-up of a collocated GNSS/Meteorological station, which is expected to provide benefits for both the meteorological and geodetic community. Applications are manifold and reach from improved GNSS troposphere products to monitoring of soil moisture in the vicinity of the station. This thesis focusses on soil moisture monitoring by means of GNSS reflectometry (GNSS-R). In a first step, an initial assessment of usability of the station for GNSS-R should be carried out. Afterwards, state-of-the-art GNSS soil moisture processing methods will be implemented in an operational python package (based on existing software and prototypes), and the quality of the so-derived soil moisture variations will be cross-validated with in-situ soil moisture measurements. A special emphasis should be given on the correction of the derived soil moisture variations by effects of vegetation growth, as well as on an analysis of effects caused by dipped reflectors.
First results with the GNSS equipment that were carried out at ETH Hönggerberg (Figure 1) showed promising results in using low-cost GNSS equipment for soil moisture monitoring. On interest or depending on the group size, this work can also be extended for the near-real-time monitoring of soil moisture variations using time-frequency analysis methods (e.g., wavelets), or the application of supervised machine learning techniques for predicting/ modelling soil moisture using GNSS and other environmental data (like temperature or precipitation).
Particularities: -
This work can be carried out by a group. Max. number of students: 2

Study direction: GNSS / Meteo
Supervisor: Dr. Matthias Aichinger-Rosenberger ()
Advisor/further supervisor: Dr. Gregor Moeller ()
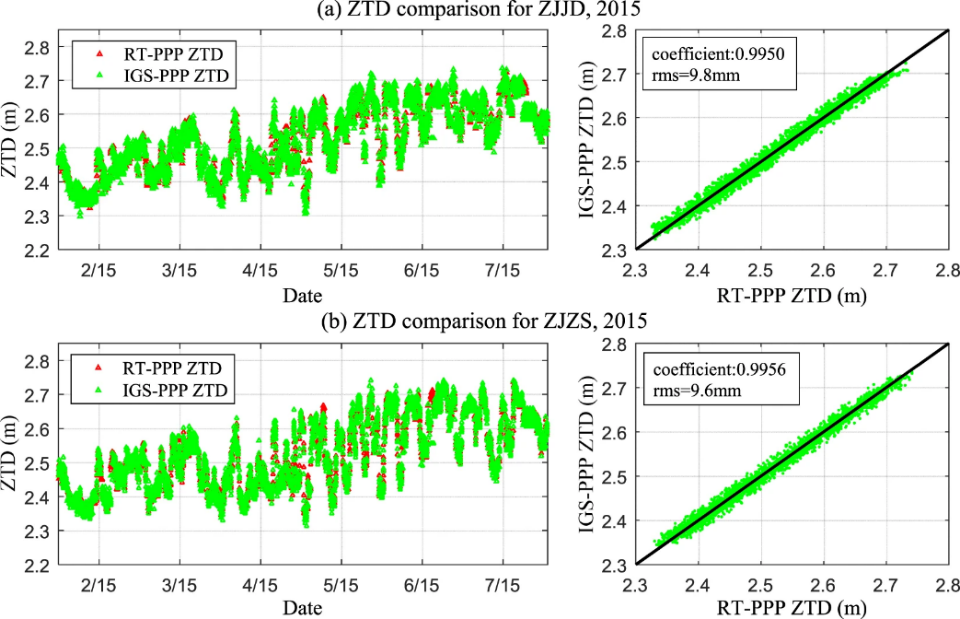
Title: Multi-purpose GNSS-Meteo collocation station: Feasibility for real-time GNSS Meteorology
Abstract: The group of Mathematical and Physical Geodesy at ETH Zürich is currently in the process of designing a prototype GNSS payload to be mounted at SwissMetNet station Zürich-Affoltern, operated by MeteoSwiss. The idea behind this approach is the built-up of a collocated GNSS/Meteorological station, which is expected to provide benefits for both the meteorological and geodetic community. Applications are manifold and reach from improved GNSS troposphere products to monitoring of soil moisture in the vicinity of the station.
This thesis should investigate the feasibility of the proposed station payload for (near) real-time troposphere monitoring. This includes a full processing chain from the receiver configuration for data logging at appropriate rates (up to 1 Hz) to data transfer/streaming and processing using appropriate GNSS software, capable of real-time Precise Point Positioning (PPP). Finally, an initial validation of the acquired tropospheric parameters (e.g. Zenith Total Delay (ZTD)) against post-processing results and GNSS-independent techniques like numerical weather models should be carried out, in order to assess usability for meteorological applications.
Particularities: -
This work can be carried out by a group. Max. number of students: 2
Study direction: Gravity
Supervisor: Julia Koch ()
Advisor/further supervisor:
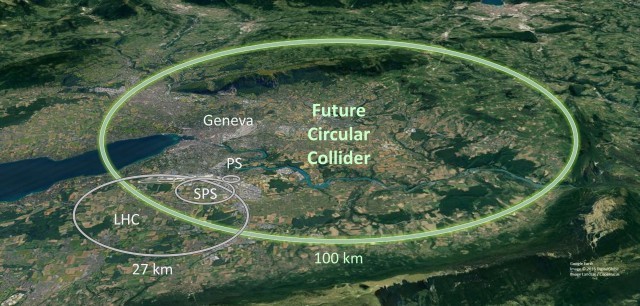
Title: Future Circular Collider at CERN: Gravity field modeling based on the information available on the geology in the region
Abstract: At CERN, a new particle accelerator, the Future Circular Collider (FCC), is in planning and at the moment a feasibility study is performed. The group of Mathematical and Physical Geodesy at ETH Zürich is responsible for the computation of a new gravity field model in the FCC region.
The goal of this thesis is the development of a density model in the region of the FCC based on the information available on the geology and the topography in the region of the planned particle accelerator. With such a density model, the gravity field quantities like the gravity acceleration, the deflection of the vertical and equipotential surfaces can then be computed and compared with the actual measurements of these quantities.
With this forward-modelling it is possible to assess the impact of different factors (like spatial resolution, errors in the density values, extension of the model required, …) on the gravity field model.
Research questions are:
- Is there enough information available on the geology and topography of the region to get a reasonable gravity field model ?
- How large a region has to be included into the density model and what is the degree of details required (spatial resolution of the model) ?
- How accurate are the gravity acceleration, the deflection of the vertical and the geoid that can be computed from such a density model?
A software package is available for the computations necessary for this work.
Particularities: 2 groups
This work can be carried out by a group. Max. number of students: 2