X-sense
The framework of this PhD thesis is formed by the SNF project X-Sense 2, which aims, amongst others, at the development of an early warning system in high-risk alpine regions in view of a reliable and fast detection of hazardous events like landslides and rockfalls. The project is led by the Computer Engineering and Networks Laboratory (TIK) of ETH Zurich. Further partners are: Group of Micro and Nanosystems (ETHZ), Institute of Geography (University of Zurich) and Institute of Geodesy and Photogrammetry (ETHZ).
Fast detection of sudden movements with GNSS in view of hazard monitoring
The framework of this PhD thesis is formed by the SNF project X-Sense 2, which aims, amongst others, at the development of an early warning system in high-risk alpine regions in view of a reliable and fast detection of hazardous events like landslides and rockfalls. The project is led by the Computer Engineering and Networks Laboratory (TIK) of ETH Zurich. Further partners are: Group of Micro and Nanosystems (ETHZ), Institute of Geography (University of Zurich) and Institute of Geodesy and Photogrammetry (ETHZ). The task of the Geodesy and Geodynamics Lab (GGL) of the Institute of Geodesy and Photogrammetry is to develop an efficient algorithm, once a Global Navigation Satellite System (GNSS) receiver is awaken by acoustic triggering, to rapidly assess the motion of the sensors’ underground. On the one hand this shall be achieved by a further development of the G-MoDe (GPS Movement Detection) algorithm, which was developed at the GGL and aims at the detection of small and rapid movements in GPS time series of relative displacements. The goal is to develop this algorithm towards a tool for detecting small movements on different scales by estimating the receiver velocity and relative displacements right from sensor start-up. On the other hand, movement detection from start-up could also be achieved by detecting motions from precise position coordinates, gained by advanced GNSS signal processing methods. In this case, the key lies in almost instantaneous resolution of the GNSS phase ambiguities. Nevertheless, for both cases filter algorithms have to be set up to separate a movement from measurement noise and other drifts and offsets arising from the different effects affecting the GNSS measurements.
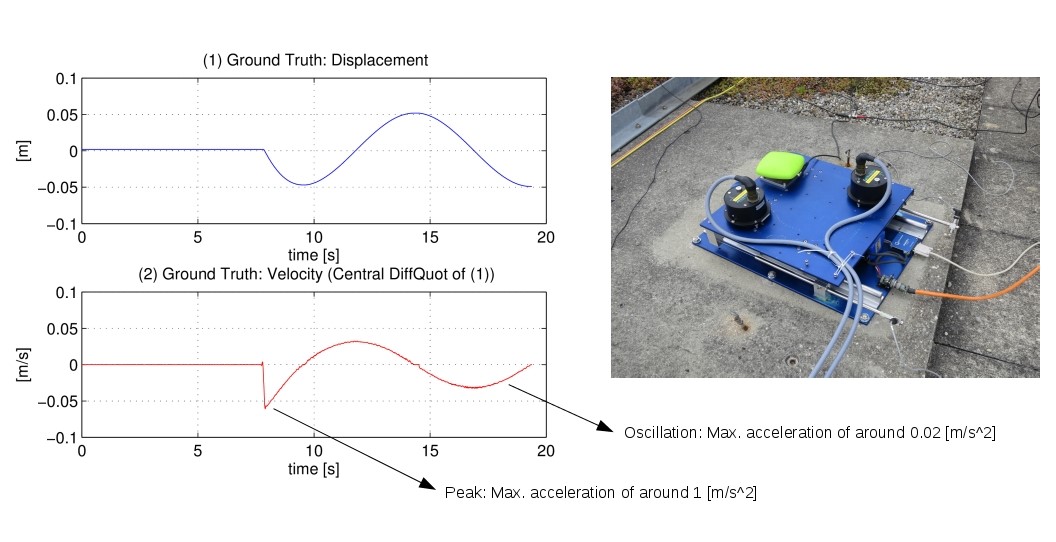
At the moment an algorithm for the movement detection in the velocity domain is under development. A preliminary version of the algorithm was tested for GPS Doppler observations (on the first satellite carrier frequency) of a shake table experiment, measured with a geodetic-grade JAVAD dual frequency receiver, sampled at 100 Hz. Therefore, a sub-dataset of a quiet period, followed by an oscillation with a period of 10 s and an amplitude of 0.05 m was extracted. The ground truth of displacement and velocity as well as the shake table instrumental setup is shown in Figure 1.
To characterize the movement, a second-order kinematic model for a Kalman filter was chosen. Figure 2 compares filter results for the x and y component of the receiver velocity for two different values of the system noise versus ground truth and an epoch-wise least squares estimation.